Projects
Non-Prehensile Object Manipulation in Simulation
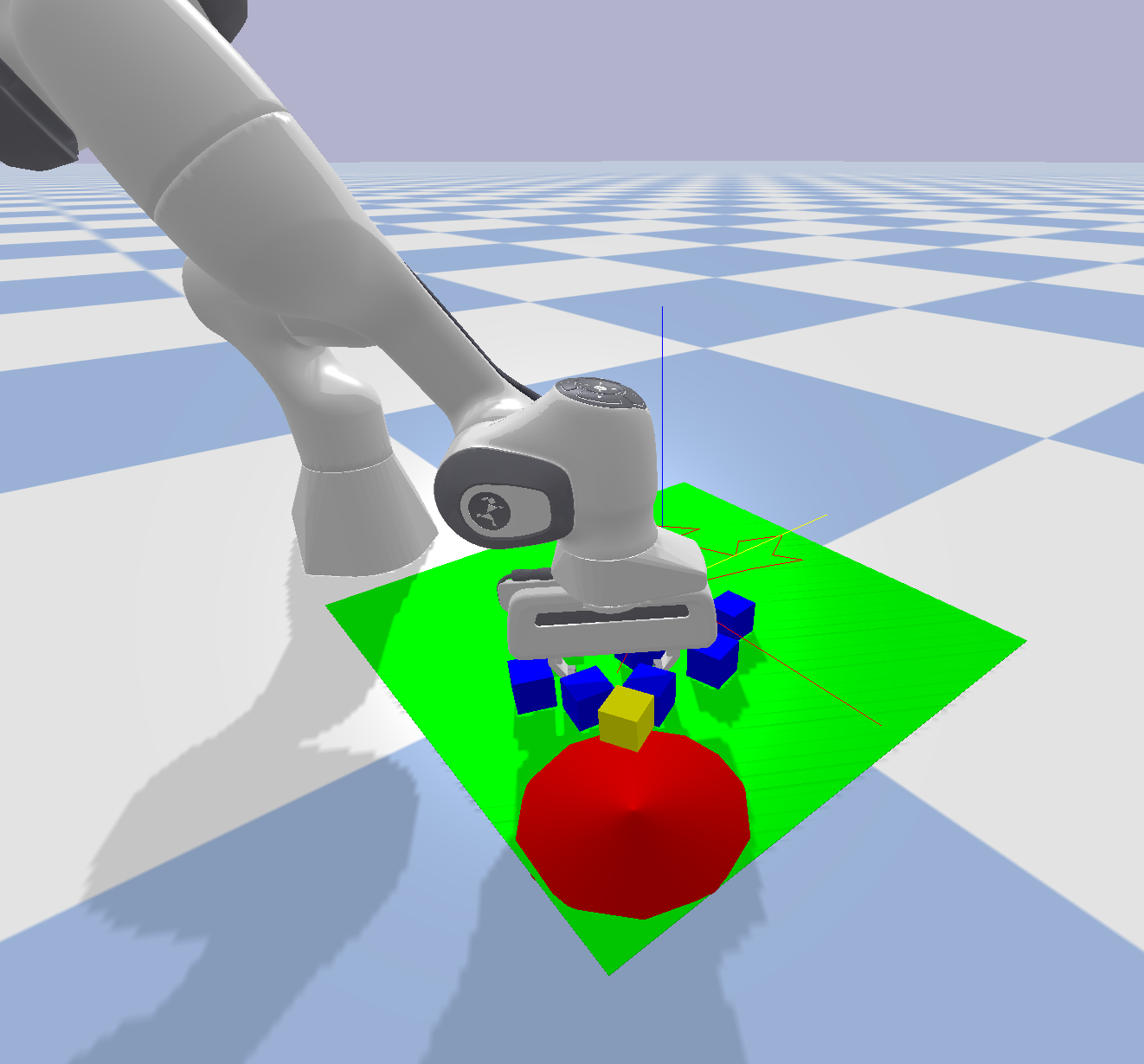
Implemented a physics-based RRT planner for non-prehensile tabletop manipulation, enabling a Franka Emika robot to rearrange objects by pushing them into target regions.
Learn More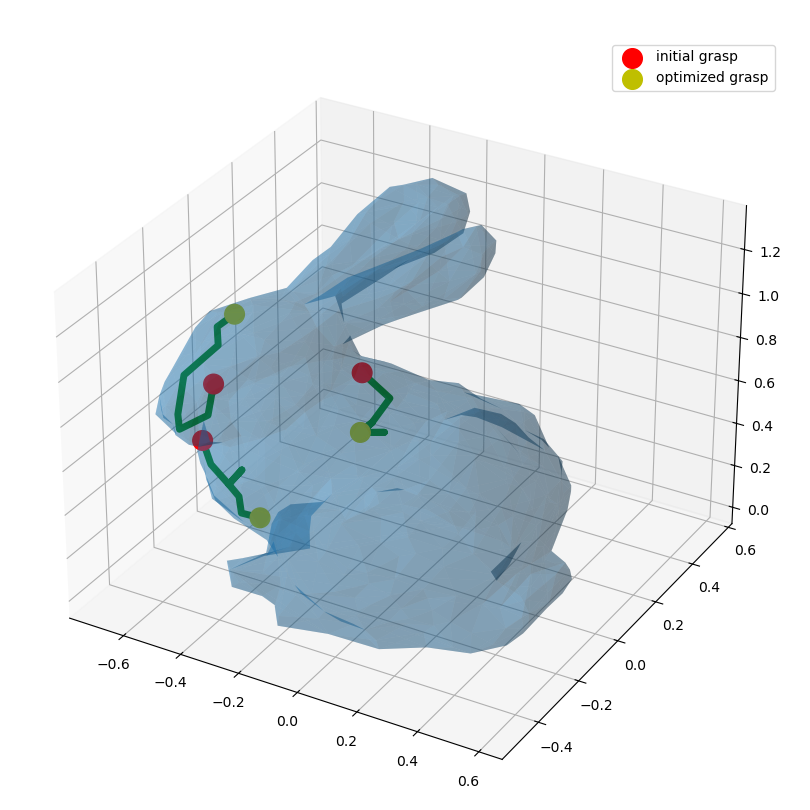
Contact-based Grasp Optimization
Utilized the Ferrari-Canny metric for contact-based grasping and optimized randomly sampled grasps for stability under reachability constraints.
Learn More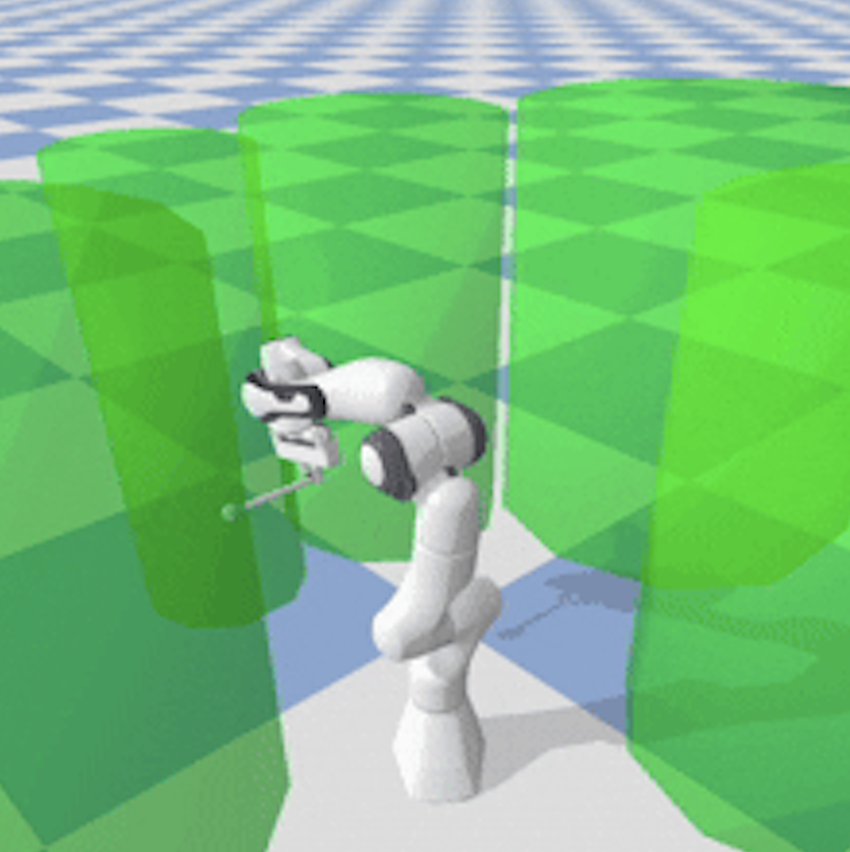
Particle Filtering
Implemented a particle filtering algorithm to estimate the base pose of a 7-DoF manipulator through contact-based interactions with surrounding obstacles.
Learn More
Capacitor
Developed Capacitor (senior design project), a collaborative first-person horror game for 2–5 players, featuring post-apocalyptic exploration, component scavenging, and survival mechanics against traps and hostile entities.
View DemoComing Soon ...
Coming Soon ...